Top Tree로 Dynamic Tree 관리하기
Top Tree로 Dynamic Tree 관리하기
이 글을 읽기 이전에 동적 계획법을 최적화하는 9가지 방법 (4/4) 의 “Dynamic Tree DP” 단원을 이해하는 것이 좋다. 이 글은 해당 내용을 잘 이해하고 있다고 가정하고 설명한다.
그래프의 특수한 경우인 트리는 PS를 포함한 알고리즘 전반에서 자주 활용되는 구조이다. 트리는 일반적인 그래프에 비해 여러 방면으로 효율적으로 관리할 수 있다. 이러한 방법은 그 자체로도 관심의 대상이 되며, 그래프 문제를 풀 때도 다양하게 응용할 수 있다. 너무나도 중요하다는 사실이 잘 알려져 있으니, 구태여 그 중요성에 대해서 긴 글을 쓸 필요는 없어 보인다.
2021년 기준으로, PS에서 다루는 수준의 트리는 대부분 정적이다: 즉, 한번 입력으로 받은 트리는 그 구조가 바뀌지 않는다. 이런 트리를 활용하는 방법은 크게 세 가지가 있다:
- Euler Tour는 트리 대신 트리의 오일러 경로 (euler tour) 를 관리한다. 트리의 rooted subtree가 구간으로 나타난다는 성질 때문에, 이것만으로도 서브트리 관련된 쿼리를 자료구조 문제로 바꿀 수 있다. Naive해 보이지만, 생각보다 매우 강력한 방법이다.
- Heavy-Light Decomposition은 트리를 여러 직선들의 체인으로 변환한다. 이 체인은, 모든 루트 - 리프 경로가 최대 $\log N$ 개의 체인과만 겹친다는 성질을 가진다. 고로 경로 관련된 쿼리는 여러 체인에 대한 구간 쿼리가 되어서, 역시 자료구조 문제로 바꿀 수 있다.
- Dynamic Tree DP는 Euler Tour의 구조가 너무 단순하기 때문에 서브트리 관련된 구조를 완벽하게 처리하지 못한다는 한계점에서 시작한다. Subtree 관련된 정보를 리프에서 루트로 Propagate시킬 수 있다는 것이 핵심 특징이다. 기본적으로 HLD에 기반해 있는데, 각 노드에 대해서 “해당 노드에서 Light edge로 연결된 자식들” 을 적절한 자료 구조 (부분 합,
std::set등등…) 로 관리해 준다. 리프에서 루트로 정보를 전파할 때, Light edges들의 자료 구조를 갱신하고, 이를 토대로 체인의 자료 구조를 갱신하다. 이러한 식으로 $\log N$ 번 반복하면 전체 정보가 관리된다. HLD에 기반해 있기 때문에, 경로 쿼리와 서브트리 쿼리가 둘 다 지원된다. 여담으로 널리 사용되는 이름이 아니고, 그렇게 깔끔한 이름도 아니기 때문에, 전세계적으로 통용되는 단어라고 오해하지 않는 것이 좋다.
실제로는 트리를 동적 으로 다루고 싶은 경우가 많다: 즉, 위에서 지원하는 기능들에 더해 트리에서 간선이 추가되고 제거되는 연산을 지원하는 것이다. 위 테크닉들은, 이러한 경우에도 다음과 같이 일반화할 수 있다.
- Euler Tour Tree (aka ET-tree) 는 Euler tour를 BBST를 사용하여 관리하는 것을 뜻한다. BBST의 split / merge 연산을 사용하여 간선의 삽입과 삭제를 지원할 수 있으며, 똑같이 서브트리 연산을 지원한다.
- Link Cut Tree (aka ST-tree) 는 HLD의 Dynamic 버전이라고 생각할 수 있다. 정확히 Heavy path를 관리하지는 않지만, 각 Splay tree에서 관리하고 있는 path가 사실상 Heavy path의 역할을 한다. 이 역시 서브트리 연산을 지원한다.
- Top Tree는 Dynamic Tree DP의 Dynamic 버전이라고 생각할 수 있다. 서브트리 연산과 경로 연산을 모두 지원하므로, 두 트리의 상위 호환이라고 볼 수 있다 (LCT의 상위 호환인 건 명백하고, ET-tree에서도 내가 생각할 수 있는 연산은 모두 지원하나 장담은 못 하겠다). Top Tree는 원래 80년대 즈음 Frederickson이 개발한 Topology Tree 에서 시작한 것으로, Dynamic Tree DP와 명확한 연관 관계는 없다. 하지만 2006년 Werneck이 제안한 rake-compress 형태의 정의는, Top Tree를 Dynamic Tree DP의 개선된 형태로 볼 수 있는 관점을 제시하였다.
세 자료구조는 각 쿼리를 $O(\log N)$ 에 처리할 수 있다. Amortization이 붙는 것으로 알려진 LCT도, 이를 제거하는 것이 가능하다.
앞 두 트리만 해도 PS에서 잘 알려진 편이지만, 마지막 Top Tree 의 경우에는 아직 잘 알려진 자료가 없다. 이 글에서는 Top Tree가 무엇인지를 소개하고, PS에서 사용할 수 있게끔 구현하는 방법을 알려줌으로써 트리 자료구조에 대한 이해를 높이고자 한다. 글의 내용은 대부분 Self-Adjusting Top Trees 논문에 기반해 있다.
정의
이 글에서는 트리 상의 간선의 배열 순서를 중요하게 여긴다. 어떠한 정점에 대해서, 이 정점에 붙은 간선들은 모두 순서가 있다고 생각한다. 달리 말해, 트리가 평면 상에 있다고 생각하고 각 정점에 대해서 인접한 정점의 리스트를 Cyclic하게 가지고 있는 것이다. 일반적으로는, 어떠한 정점에 붙어 있는 간선의 순서를 중요하게 생각하지 않음을 기억하자.
트리 $T$ 가 있을 때, 다음 두 연산은 정점의 개수가 1 감소한 새로운 트리를 만든다.
-
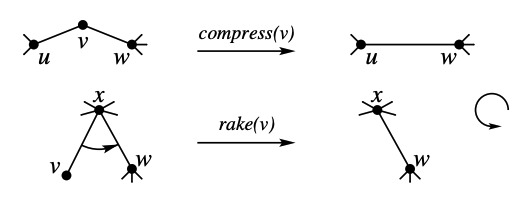
compress(v): $v$ 의 차수가 2일 때, $v$ 에 인접한 두 정점 $u, w$ 를 잇고, $v$ 를 지운다. (이 과정에서 Cyclic한 순서를 보존한다.) -
rake(v): $v$ 의 차수가 1일 때 (리프일 때), $v$ 의 sibling (부모의 자식) 중 cyclic한 순서 상에서 인접한 정점을 골라, 해당 정점에 붙인다.
이제 포레스트 $F$ 가 주어졌을 때, $F$ 에 대한 Top Tree를 정의한다. Top Tree는 클러스터 (cluster) 로 구성된 Rooted binary forest로, 각 클러스터는
- 두 자식 클러스터를 Compress한 것.
- 두 자식 클러스터를 Rake한 것.
- 자식이 없고, 실제 포레스트 $F$ 의 간선에 대응되는 리프 클러스터 (Base Cluster)
리프가 아닌 자식 클러스터는, Compress / Rake 과정에서 생긴 새로운 간선에 대응된다고 볼 수 있다. 즉, 각 클러스터는 위 Compress / Rake 연산으로 줄여나가는 과정에서 등장하는 간선에 대응된다. 클러스터를 compress, rake한다는 것은 이 맥락에서 해석할 수 있다.
사용자는 Top Tree에 대해서 다음과 같은 public function을 호출할 수 있다. 이 함수는 $O(\log N)$ 시간에 작동한다. 이 글에서는 Amortized bound를 맞추는 방법에 대해서만 논의하며, Worst-case bound는 가능하지만, 논의하지 않는다.
link(v, w): $v, w$ 가 주어졌을 때, 둘이 연결되어 있지 않다면 $(v, w)$ 를 잇는 간선 추가.cut(v, w): $v, w$ 가 주어졌을 때, 둘을 잇는 간선이 있다면 $(v, w)$ 를 잇는 간선 제거.expose(v, w): $v, w$ 가 주어졌을 때, 둘이 연결되어 있다면 루트 클러스터가 $(v, w)$ 를 직접 잇는 간선에 대응되게끔 수정.
Expose 함수는, 위 Compress / Rake의 최종 결과가 특정 간선이 되게끔 강제하는 효과를 가진다.
여기까지 봤을 때, 우리는 Top Tree를 포레스트에 대한 이진 탐색 트리 (BST) 라고 생각할 수 있다. 예를 들어, 관리하는 트리가 직선의 형태라면, Link / Cut 연산은 Merge / Split 연산에 대응되며, Expose 연산은 특정 구간을 자르는 연산에 대응된다.
BST의 이점을 가져가기 위해서는, Top Tree의 깊이가 작아야 한다. 임의의 트리에 대해서, 항상 $4 \log N$ 의 깊이를 가지는 Top Tree를 구성할 수 있다. 하지만 이 글에서는 이에 대해서 다루지 않고, 대신 Splay tree / Link cut tree와 동일한 느낌의 self-balancing 전략을 사용한다. LCT가 $O(\log N)$ amortized bound인 것을 증명하지 않듯이, 이 글에서도 이 전략을 사용할 때 $O(\log N)$ amortized bound가 나오는 것을 엄밀히 증명하지 않는다. 대단히 귀찮고, Splay / LCT에 익숙한 독자들에게는 거의 직관에 어필할 수 있는 내용이기 때문이다.
초기화
이 단락에서는 트리 $T$ 가 주어졌을 때, $T$ 에 대한 Top Tree를 어떻게 만드는지를 소개한다. 이 부분은 실제 구현에 필요한 것이 아니라 단순히 개념을 설명하기 위함으로, 실제로는 단순히 link 연산을 $n-1$ 번 수행하면 되기 때문에 굳이 시간을 들여 초기화할 필요가 없다.
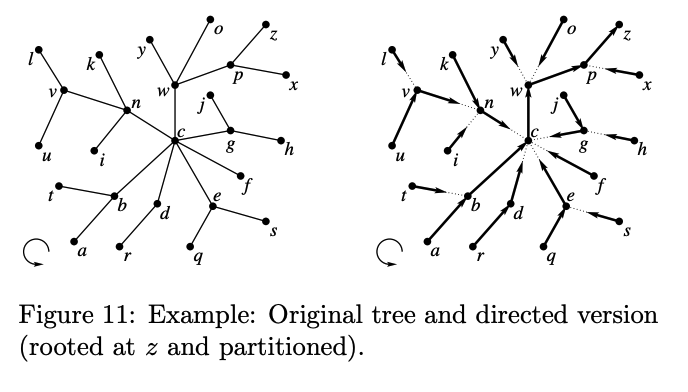
트리 $T$ 에서 아무 리프 $z$ 를 잡아서 루트로 만든 후, 트리의 간선 집합 $E(T)$ 를 루트 방향으로 가는 path들의 집합으로 분할하자. 각 path는 리프에서 출발하여, 다른 path의 끝에서 끝나거나, 아니면 루트 ($z$) 에서 끝난다. 루트에서 끝나는 케이스는 단 하나이며 이 경우를 root path라고 부른다. Root path를 제외한 모든 path에 대해서, 해당 path에 대한 “parent path” 가 있다고 생각할 수 있다: 이는 해당 path의 끝이 닿아 있는 다른 path를 뜻한다. 이렇게 생각할 경우, 트리의 path들 역시 트리를 이룬다.
이제 Root path에서부터 재귀적으로 내려가면서 Top tree를 초기화한다. 초기화는, 트리 전체를 하나의 Root cluster로 묶는 것이다.
위에서 Path들 역시 일종의 트리를 이룬다고 설명했다. 현재 처리하고 있는 경로를 $p$ 라고 하자. $p$ 에 대해서, $p$ 의 정점에서 끝이 나는 다른 경로들이 있을 것이다. 이들은 path들로 만든 트리에서 자식 노드에 대응된다. 각 자식들에 대해서 재귀적으로 초기화를 진행한다. 초기화를 할 경우, 자식 서브트리는 하나의 간선으로 압축되어 있을 것이다.
이제 $p$ 에 어떠한 클러스터들이 달려 있다. 이 클러스터들 역시 자식 간의 순서 를 지키기 때문에, 경로 왼쪽에 있는 클러스터와 오른쪽에 있는 클러스터는 분리되어 있다고 생각할 수 있다. $p$ 의 왼쪽에 달린 클러스터들을 rake 연산으로 합쳐주고, 오른쪽에 달린 클러스터들을 rake 연산으로 합쳐주자. (Self-balancing할 것이니 상관 없지만, 결국 rake 연산으로 합친 것도 최대한 밸런스가 유지되도록 하는 것이 좋다.) 만약 $p$ 의 길이가 $k$ 라면, 이후 최대 $2k-2$ 개의 클러스터가 경로의 양 옆에 붙어 있다.
$p$ 와 클러스터들을 하나의 클러스터로 합치기 전에, $p$ 에 달린 클러스터가 없고 경로만이 존재하는 케이스를 생각해 보자. 이 경우, 경로 상 홀수 번째 정점들을 반복적으로 compress하는 것으로, $p$ 를 쉽게 하나의 클러스터로 만들어 줄 수 있다.
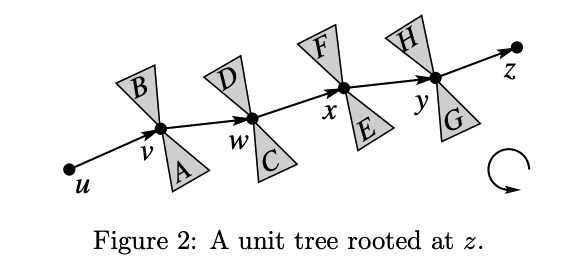
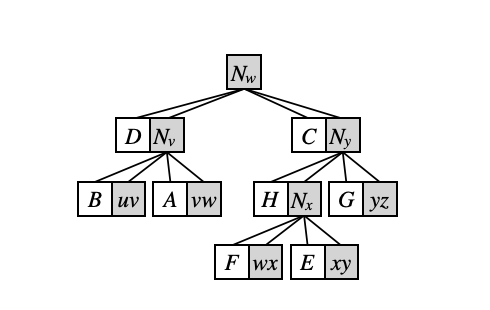
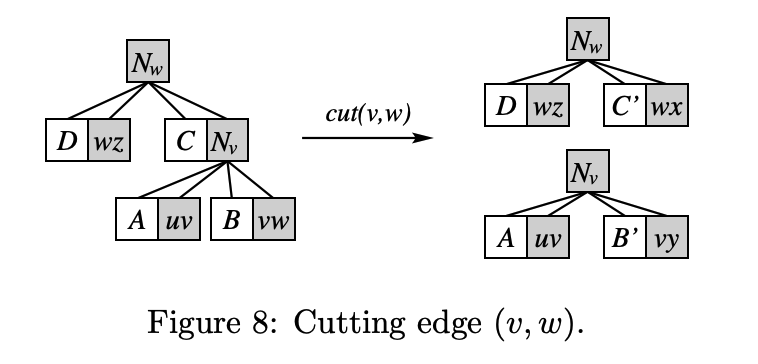
$p$ 에 달린 클러스터가 존재할 경우, rake 연산을 통해서 이 클러스터들을 지워줘야 한다. 이들을 지울 때는, 어떠한 정점 $v$ 가 Compress되기 직전에 $v$ 에 붙은 두 클러스터를 rake하는 식으로 처리한다. 예를 들어, $p$ 위에 경로 $u - v - w$ 가 있고, $v$ 의 왼쪽과 오른쪽에 클러스터 $A, B$ 가 있다고 하자. $v$ 를 Compress하기 직전에, $A$ 를 $v - w$ 에 rake하고, $B$ 를 $u - v$ 에 rake 한 후, $v$ 를 compress한다. 이 경우 경로 상에서의 Compress 연산 하나는 총 4개의 클러스터를 표현한다고 할 수 있다. 이를 표현하는 것이 아래의 그림인데, $N_v$ 라는 노드의 자식이 4개가 있고, 이 중 Compress 직전에 Rake한 클러스터들끼리는 붙어 있음을 볼 수 있다. 흰색으로 표기된 노드들은, 맨 처음에 압축한 Rake tree들이다.
이렇게, Top tree의 구성에 대해서 살펴봤다. Dynamic Tree DP의 관점에서 살펴봤을 때, Compress tree는 각 Heavy chain에 대해서 관리한 자료구조이고, Rake tree는 각 정점마다 Light edge들을 관리하는 데 사용되는 자료구조에 대응됨을 알 수 있다. Top tree는 Compress tree의 각 노드마다 Rake tree를 적절히 붙이는 방식으로, 이러한 두 다른 역할의 자료구조를 최대한 일관성있게 관리하려고 한다.
업데이트
이제 실제 구현에 사용되는 업데이트들을 어떻게 구현하는지에 대해서 살펴본다.
먼저 정점에 대한 표현을 지원하기 위해 각 정점의 Handle 을 정의한다. 기본적으로, 리프가 아닌 노드 $v$ 에 대해서 Handle $N_v$는, $compress(v)$ 가 진행 된 노드를 뜻한다. 리프의 경우에는, $v$ 를 끝점으로 가지는 top-most non-rake 노드이다. 즉, $v$ 에서 시작하는 Path의 루트 노드라고 생각하면 좋다. 이 글에서는 정점을 표현할 때 Handle 이라는 개념을 사용하지만, 실제로 구현에서는 다양한 방법이 있을 수 있다. 예를 들어서, 각 정점마다 Dummy node를 만들어서, 해당 노드가 항상 Top tree의 리프에 와 있다는 Invariant를 지키는 선에서 구현하는 방법이 그 중 하나이다.
Splay 연산은 표현되는 트리를 바꾸지 않으면서 어떠한 노드를 루트로 바꾸는 과정이다. Splay 연산을 할 때 중요한 점은, 각 Rake tree / Compress tree의 Scope를 벗어나지 않는다는 점이다. 다른 말로, splay 연산을 통해서 어떠한 노드를 Top tree의 루트로 바꾸는 것이 아니고, 각 Rake/compress tree의 루트로 바꾸는 것이다. 이러한 형태의 Splay를 Guarded splay 라고 부른다. 약간 Naive해 보이지만, 이 정도로도 Top tree의 시간 복잡도를 amortized $O(\log N)$ 으로 보장할 수 있다. 이것을 제외하고 Splay 연산에 대해 특이한 점은 없다. 일반적인 Splay tree와 같이 rotate 연산을 반복 적용하면 된다.
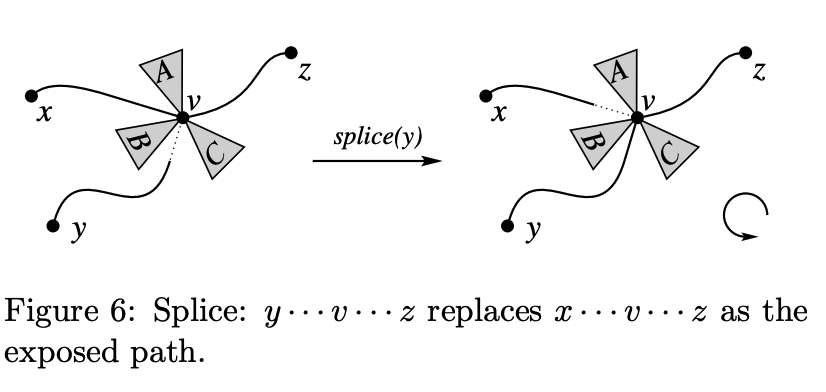
Splice 연산은 Link-cut tree의 Access 연산을 atomic하게 적용한 버전이라고 생각하면 좋다. $p_1, p_2, \ldots, p_k$ 를 루트에서 $v$ 로 가는 internal path들의 수열이라고 하자. Splice 연산은 $p_{k - 1}$ 을 $p_k$ 에 인접한 지점을 기준으로 두 조각으로 자른 후, 루트에 가까운 조각을 $p_k$ 에 붙인다. 이렇게 되면 internal path의 수열의 길이가 하나 줄어든다.
Expose 연산은 $v - w$ 간의 경로를 추출하는 방법이다. Soft Expose 는 경로를 루트 바로 근처 (루트의 오른쪽-> 왼쪽, 왼쪽 -> 오른쪽 자식) 에 두는 것이고, Hard Expose는 잠시 연결을 끊으면서까지 경로를 루트로 만드는 것이다. 이 글에서는 Soft Expose만 설명한다 (Hard expose를 굳이 구현할 필요가 별로 없다). 일단 $N_v$ 를 Splice하고, 중간 경로를 뒤집는 식으로 $v$ 가 루트가 되도록 rerooting하자. 이렇게 되면, $N_w$ 를 Splice하면 경로를 추출할 수 있다.
Cut 연산은, 자를 간선 $v - w$ 를 Soft expose함으로써 쉽게 구현할 수 있다. 정확히는, 자를 간선을 Soft expose한 후, 간선의 부모 (둘 다 Vertex handle이다) 와 간선 사이의 연결을 끊는다. 이제 두 handle에 대해서 한 쪽 Child가 비어있게 되는데, 지운 간선과 Cyclic하게 인접한 두 간선을 해당 Child에 붙여주면 된다. Link 연산에서는 이를 반대로 하면 된다.
Top Tree를 사용하여 해결할 수 있는 문제들
이 단락에서는 Top Tree를 사용하여 간단한 문제들을 해결해 봄으로써, 이 자료구조가 어떻게 문제 해결에 도움이 되는지를 알아본다. Top Tree를 사용하면, 간선이 삽입 / 삭제 되는 트리에 대해서 다음과 같은 문제들을 해결할 수 있다.
문제 1. 모든 간선의 가중치 합을 계산하라.
증명. 각 노드에 대해서, $sum(v)$ 라는 값을 관리하자. 이는 해당 노드의 서브트리에 있는 가중치의 합을 뜻한다. (이 문제는 물론 자명한 문제이며, 서브트리 값을 가져올 때 클러스터 타입도 중요하지 않다.)
문제 2. 경로 $v - w$ 상에 속하는 간선의 최대 가중치를 계산하라.
증명. 경로 $v - w$ 를 Expose하면, 해당 Path 안에 있는 간선들의 가중치 최대를 계산하면 된다. Compress cluster에서 온 가중치의 최댓값 $pathMax$ 를 bottom-up으로 모아주면 된다. Rake cluster에서 온 가중치는 무시해 주자.
문제 3. 경로 $v - w$ 상에 속하지 않는 간선의 최대 가중치를 계산하라.
증명. 문제 2의 풀이에 $ignoredMax$ 라는 값을 추가로 두어서, Rake cluster에서 버려진 값 ($pathMax, ignoredMax$) 들을 모아준다. 값을 무시할 때마다 모아준다고 생각하면 된다.
Remark. 문제 2/3의 풀이는 최댓값이 아닌 합에 대해서도 당연히 적용된다.
문제 4. 경로 $v - w$ 상의 간선에 특정 상수 $c$ 를 더하거나, 최댓값을 계산하는 쿼리를 해결하라.
증명. 이제 Lazy propagation이 추가되지만, 원리는 동일하다. Compress cluster 자식에만 값을 전파해 주고, Rake cluster 자식에는 하지 말자.
문제 5. 트리의 지름을 계산하라.
증명. 각 노드에 대해서 1) 지름, 2) 경로의 길이, 3) 경로의 각 끝점에서 가장 먼 점과의 거리 를 관리하자. 두 경우 모두, 두 클러스터가 공유하는 정점이 정확히 하나 있다. 클러스터 안에서 이 정점을 지나는 가장 긴 경로는 2) 정보를 통해서 알 수 있고, 고로 지름을 구해줄 수 있다. 지름 외 정보는 쉽게 계산할 수 있다.
문제 6. 각 정점을 mark / unmark 하는 쿼리, 그리고 각 정점에 대해서 해당 정점과 가장 가까운 marked 정점과의 거리를 찾을 수 있다.
증명. 각 정점에 대해서 더미 간선을 만들어 주자: 그냥 해당 정점에서 리프 하나를 더 뻗어주면 된다. 각 간선에 대해서, 양 끝점에 가장 가까운 마킹된 정점과의 거리, 그리고 경로 길이를 계산해 주자. 이 둘은 각 클러스터 종류에 따라 쉽게 합쳐줄 수 있다. 쿼리가 들어올 때는, 각 정점에 연계된 더미 간선을 expose하면 된다. Mark는 양 끝점의 거리를 0으로, Unmark는 $\infty$ 로 설정하자.
문제 6까지는 모두 local 한 성질에 대해서만 다뤄봤다. 어떠한 성질이 local 하다는 것은, 해당 성질이 서브트리의 값만 가지고 유추 가능하다는 것을 뜻한다. 예를 들어서, 서브트리 합은 Local한 성질이다. 두 자식의 서브트리 합만 알면 구할 수 있기 때문이다.
일반적인 BST로 구하고자 하는 모든 정보가 local 한 것은 아니다. 예를 들어서, 배열의 $k$ 번째 원소를 접근하는 것은 Local하지 않다. 자식의 $k$ 번째 원소랑 부모의 $k$ 번째 원소와는 연관이 없으며, 연관을 가지기 위해서는 훨씬 더 큰 context가 필요하기 때문이다. 일반적인 BST에서는, 이를 Top-down으로 루트에서부터 트리를 타고 내려가면서 해결할 수 있다. 만약 Top-tree에서도 이것을 할 수 있다면, 흥미로운 문제들을 많이 해결할 수 있다. 예를 들어서, Level ancestor를 계산하여 LCA를 찾거나, 트리의 Centroid를 단순 이진 탐색으로 구할 수 있다.
일단 Level ancestor를 계산하는 것은 단순 Expose 후 정말 BST에서 하는 것처럼 클러스터를 타고 내려가면 된다. 이 부분에 대해서는 설명을 생략한다. 다른 케이스들의 경우, Top Tree에서는 choice 라는 함수를 통해서 이러한 성질을 Abstraction한다. 이에 관해, 아래에 몇 가지 Lemma를 소개한다.
- Lemma (Center). 트리 $T$ 와 두 인접한 클러스터 $A, B$가 $A \cap B = {c}$, $A \cup B = T$ 를 만족하면, 다음이 성립한다. $max_dist(A, w)$ 가 임의의 점 $v \in A$ 와 $w$ 간의 최대 거리라고 했을 때, $max_dist(A, c) \geq max_dist(B, c)$ 일 경우, $A$ 는 모든 Center를 포함한다.
-
Lemma (Centroid). 위와 같이 정의하자. 만약 $ A \geq B $ 이면 $A$ 가 $T$ 의 Centroid를 포함한다.
이제 루트 클러스터가 주어졌을 때, 우리는 루트 클러스터의 자식 $A, B$ 에 대해서 어느 쪽이 우리가 원하는 정점을 가지고 있는지를 알 수 있다. 즉, 해집합의 크기를 반으로 줄일 수 있다. 이 함수를 $choice$ 라고 부르자. 여기서 착각하면 안 되는 것이, 루트 클러스터 에 대해서만 위 정보를 알 수 있기 때문에, 반복적으로 해집합의 크기를 반으로 줄일 수 있는 것이 아니다.
해집합을 반복적으로 반으로 줄이기 위해서는 Top Tree를 수정할 수 있어야 한다. 해집합을 한 클러스터에 관리하고, 이를 $C$ 라고 부르자. 초반에는 $C = T$ 이며, 이를 반으로 줄이는 것은 $choice$ 함수를 사용하면 된다. 이후에도 반복적으로 해집합을 줄이기 위해서는, $C$ 클러스터의 자식 $(A, B)$ 를 변경해서, 이들이 루트 클러스터 $R = (A^\prime, B^\prime)$ 의 서로 다른 자식으로 들어가게끔 변경해 주면 된다. 이렇게 하면, $choice(R)$ 의 반환값을 토대로 $C \leftarrow A$ 인지 $C \leftarrow B$ 인지를 판별할 수 있고 전체 문제가 해결된다.